press
ADS-B now supported in beta 3.4 APM software for copter and planes
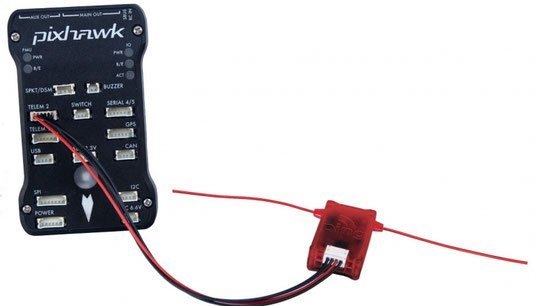
Native support for the uAvionix PingX ADS-B receiver is now available in beta of the 3.4 code for Copter, Plane and Helicopter. Below is the procedure for loading the firmware on your Pixhawk/APM autopilot to visualize ADS-B compliant aircraft in your operational vicinity.
- Verify that you are running the latest version of Mission Planner
- Open Mission Planner and click “Install Firmware” from the “Initial Setup” window
- Use the Hot Key command “Ctrl Q” to access Beta/Trunk firmware (V3.4dev) and click load
- Once the firmware update is complete, power cycle the autopilot
- Verify a successful update by viewing “Flight Data–Message” window located in the bottom left corner of Mission Planner
- Set ADSB_ENABLE to “1” in the Mission Planner parameters list
- The default plug-in on the Pixhawk autopilot for pingRX remains TELEM2
Resources