Your Shopping Cart
blog
Why Certified GPS with Integrity for UAS Navigation Matters
There is more to your GPS than its accuracy statistic
We know all about GPS, right? They tell us to turn left or right, give us an ETA to home or work, share our location with friends on our mobile devices, and allow us to precisely track our rides, runs, flights, hikes, floats, drives…. whatever. The casual user might think this is a nearly perfect technology – after all, it shows me I’m on the street I’m actually on, and sometimes even the correct lane.
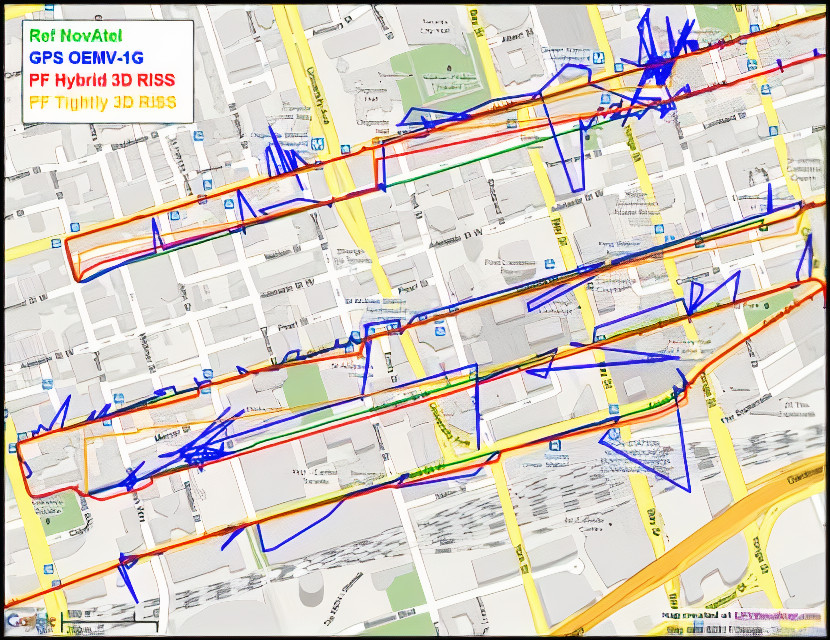
But for those applications, there is a lot of algorithmic trickery happening to make sure our presented position is “snapped to” a valid road. You get a little glimpse of this trickery in your car when you begin to deviate from the prescribed route on your nav by taking a highway exit it isn’t expecting you to take. The nav map will show you continuing along the highway for several seconds. Once convinced you’ve pulled off at an exit, it’ll “snap” you over to that off-ramp. The “accuracy” of that GPS position is a combination of the GPS performance and the underlying algorithms placing you on the virtual roads. If you were to look at the actual GPS position along a road route in an urban canyon, you might actually be horrified…. it’ll look something like the blue line below, rather than the orange one which is presented to the user.
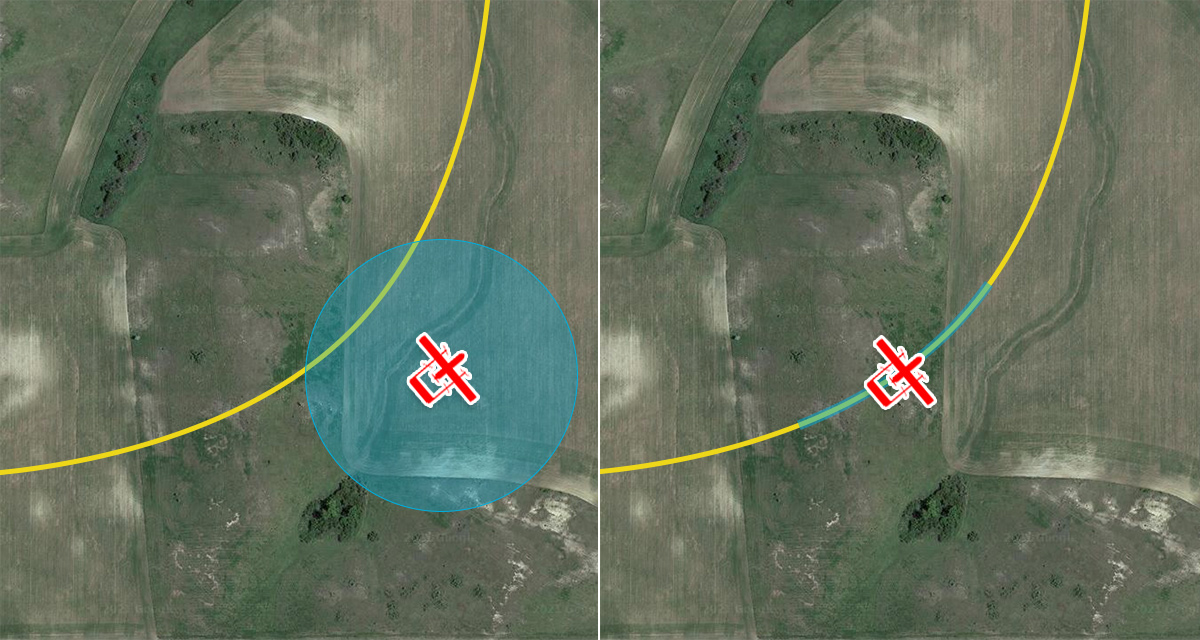
In airborne applications, there are no roads to be snapped to. So, when our position begins to wander, do we even know about it? The answer is “Yes,” if we’re equipped with an aviation-grade GPS. This week, uAvionix announced our UAS SBAS GPS “truFYX” received its FAA TSO-C145e certification. It’s a big deal, but most don’t know why. We’ll take a shot at explaining it.

There’s More to an Aviation GPS than Accuracy
In aviation, there is a concept called Performance Based Navigation (PBN) which (in general) recognizes that the requirements of your navigation system (e.g. GPS and INS) may differ based on the airspace in which you’re flying. For example, you need a higher-performing navigation system for approach and departure then you do for en route or oceanic operations. When it comes to defining that performance as it applies specifically to a GPS, four parameters are used:
Accuracy – unsurprisingly, accuracy is the most commonly referenced. Accuracy compares the calculated position vs. the true position at any given time. Accuracy is a statistical measure, so a statement of accuracy (“1-meter accuracy”) is completely meaningless unless it includes a statement of the uncertainty that applies (“1-meter accuracy 95% of the time”). Even the latter can be misleading and not reflect real-world performance – since performance in an open “live-sky” environment with clear views to the horizon will produce different results in an urban canyon.
Availability – is the percentage of time the system can provide the required positioning performance. This is a function of the signal availability from the GPS and SBAS constellations, receiver design and physical characteristics, environmental characteristics, and the technical capabilities of both transmitter and receiver.
Continuity – is the ability of the total system to do its job without interruption during the intended operation. This is akin to a location-specific measure of availability. For example, availability might decrease when entering an urban area from a rural area during a flight operation.
Integrity – is one of our favorites and one of the hallmarks of our truFYX system. Integrity is the measure of trust that can be placed on the information supplied by the system. What makes an aviation GPS so different from a consumer GPS are the requirements around integrity monitoring. truFYX provides several methods to ensure integrity requirements are met, including using data from SBAS satellites and internal processing called Fault Detection and Exclusion (FDE). In order to achieve this certification, we were required to prove that we can provide timely alerts of integrity issues, not miss alerts, not create false alerts more than once per 3 million samples, and be able to detect faulty satellite data better than 99.95% of the time with the ability to further exclude that data. To prove all of this, we were required to run an exhaustive battery of tests that no consumer GPS could pass, including one that requires executing 99 million (!) different scenarios to generate confidence in the algorithms. These tests are not executed under perfect conditions; they are designed to stress the system by injecting interference and noise during the testing, often at levels that would reduce a consumer GPS to a quivering mass of Jell-O.
Reinforcing the trust garnered by testing, the system must be specifically engineered to a high Design Assurance Level (DAL), which is designed to bring rigor to development and help eliminate any flaws.
Because of the importance, these integrity metrics are specifically captured within an ADS-B message. Source Integrity Level (SIL) and System Design Assurance (SDA) are key parameters that are broadcast, telling Air Traffic Control (ATC) and Traffic Collision Avoidance Systems(TCAS) receiving the message how much trust should be placed in what the aircraft is telling them about its position. Regulators require that the integrity level be such that the probability of a position error exceeding a “containment radius” be less than once every 10 million calculated positions.
In general, Integrity speaks to the quality of a product’s engineering and production, accuracy speaks to its statistical performance over time, and availability and continuity are both related to physical installation, health of the GPS constellation, and environmental characteristics which can include atmospheric conditions and real-world considerations like an obscured horizon due to buildings or terrain. As a general rule, apart from accuracy, none of these parameters weigh heavily on a commercial-off-the-shelf (COTS) non-aviation grade GPS system.
truFYX in Action
At uAvionix, we’ve gone “all-in” on leveraging the truFYX certified GPS to enhance the pedigree of UAS integration and our products. For starters, it is the only certified GPS receiver compliant with FAA and global ADS-B mandates that isn’t larger than our TSO-certified transponder, ping200X. It also pairs nicely with our defense offerings, the AIMS certified RT-2087/ZPX-A and RT-2087/ZPX-B Mode 5 IFF Micro Transponders. But these uses are somewhat obvious.
We’ve also integrated it with our George UAS autopilot, making it the only UAS autopilot with a TSO-certified position source as its standard navigation input. We believe the current work being conducted by both RTCA and ASTM will solidify the benefits of certified GPS position sources for unmanned navigation.
https://uavionix.com/wp-content/uploads/2021/08/IMG_1818-1024×683.jpghttps://uavionix.com/wp-content/uploads/2021/08/IMG_1802-1024×683.jpg
truFYX is also a critical component in our Command and Control (C2) products. Our current radios leverage GPS timing for their precision frequency hopping algorithms, making the radios less susceptible to radio-frequency (RF) interference. Looking ahead, new radios will benefit from leveraging certified GPS timing since it’s a key component of the 2-way radio link called out in RTCA DO-362A: Command and Control (C2) Data Link Minimum Operational Performance Standards (MOPS) (Terrestrial).
https://uavionix.com/wp-content/uploads/2021/08/IMG_1887-1024×683.jpghttps://uavionix.com/wp-content/uploads/2021/08/IMG_1907-688×1024.jpg
Where are the standards heading?
So, when it comes to defining the requirements for BVLOS from a navigation system perspective (PBN for UAS) – there are two concurrent activities in play.
RTCA SC-228 WG-4 Navigation
Recognizing that all possible UAS operations are an overly broad topic, SC-228 (Special Committee for UAS) WG-4 (UAS Navigation) intends to limit the scope and provide near-term focus by dealing only with VFR and IFR planned path UAS operations for fixed-wing aircraft greater than 55 lbs operating in and out of traditional airports.
Its objective is to produce a document that focuses on near-term UAS applications and identify navigation gaps within those applications. In doing so, it doesn’t intend to develop UAS navigation standards. Instead, it intends to apply existing navigation standards to UAS, identify navigation gaps when applying those existing standards, and make recommendations to the RTCA Program Management Committee (PMC) and other standards committees to develop modified or new navigation equipment standards that bridge identified navigation gaps.
Gap analysis is dealing with point-to-point IFR and VFR operations and their dependence on navigation characteristics like accuracy, integrity, continuity, availability, and coverage volume. Also being discussed are currently fielded navigation systems and their applicability to UAS; e.g., GNSS, Inertial, DME, VOR, ILS, etc. Possible future navigation systems and hybrid approaches also are being considered.
Submission of this proposed document to the PMC is planned for May 2022, with PMC approval and publication to follow in June.
ASTM F.38 WK75923
F38 is the ASTM Technical Committee on Unmanned Aircraft systems and is responsible for standards and guidance materials for UAS. One of its components, AC478, is responsible for BLOS (Beyond Line of Sight) Strategy & Roadmapping for UAS. Of 20 functions essential for BLOS operations, three are related to PNT (Position, Navigation, and Timing); specifically, Positioning Assurance; Navigation; and Time Synchronization.
To flesh out these three functions, F38.02 (Flight Operations) has begun the development of WK75923: “New Specification for Positioning Assurance, Navigation, and Time Synchronization for Unmanned Aircraft Systems.” Standards approval and publication are planned for January 2022.
In contrast with SC-228 WG-4, WK75923 is focusing on small, low-flying UAS; i.e., less than 55 lbs and operating under 400 ft AGL in B/C/D/E airspace, both with and without UAS Traffic Management (UTM). Additionally, it intends to produce a standards document and not just make recommendations. Scope includes a definition of “position assurance”, minimum requirements for UAS navigation, and a definition of “time synchronization”, along with minimum requirements for the UAS to know the time value being used is assured and trusted.
What should we take away from this?
In short, the GPS, and navigation systems in general, need to step up and provide exemplary performance for all four of the key parameters discussed, not only accuracy. Beware of the GPS system with only accuracy claims, and only accuracy claims without the statistical element. Quantifying those parameters is a work in progress by at least two standards bodies. A GPS like truFYX is markedly different than the GPS in our watches and phones, and we shouldn’t expect a BVLOS UAS to operate successfully with a phone GPS.
In the future, TSO-C145e could evolve into TSO-C145f to better account for UAS operations, or perhaps a new standard altogether will be produced. If so, start counting away the years. Logic tells us the same core principles and metrics that govern PBN for manned aviation extends into its unmanned counterpart. After all, BVLOS operation with a total failure of the navigation system is not a viable option when no pilot is onboard to visually navigate.